Constraint Based Learning Heuristics for Throwers

“Athlete specialization is narrow in it’s goals, but not in its means”
One of my favorite ways to conceptualize skill acquisition is in the form of a funnel. When looking to build elite throwers, goals of the skill are pretty narrow. Throw this baseball 100+mph through the strike zone, or throw this javelin 90+ meters. The amount of ways that an athlete can successfully train to perform these specific outputs is large. In this sense, the question is not so much “what drills should I do do throw harder”, but rather “what are the limiters to my output, and what are the principles of program design that I can pour my training economy into to remove these limiters”. This is why breaking down these large principles into heuristics (mental shortcuts or “buckets” used to simplify decision-making and problem-solving) will be so crucial to building skill acquisition systems around these concepts.

Upon a close look, you’ll probably notice the skill acquisition funnel is very similar to the Bondarchuk Pyramid. I tend to think of the difference (although they go hand in hand) being the gap between “capacity for” and “expression of”.
As we dive into constraint based learning heuristics later, keep in mind that they are not only tools to improve motor learning strategies necessary for expression of skill, but also very valuable tools for managing workload in pursuit of necessary capacity for skill.
A few housekeeping terms and background information on the topic of ecological dynamics to start:
Degrees of Freedom
Refers to the number of independent components in a system that can vary during movement (the more freedom for multiple joint articulations in a movement, the more degrees of freedom. The challenge in motor learning is managing these to produce coordinated movement.
Rate Limiters
Rate limiters in the factors that are restricting or slowing down the acquisition of a motor skill. Multiple spots on the skill acquisition funnel can be rate limiters, which is why an objective assessment is so useful for determining where to spend training economy in respect to return on investment.
Affordance Perspectives
Derived from James Gibsons theory of affordances in the field of ecological psychology, affordances are opportunities for action provided by the environment and perceived by the individual based on their capabilities. In motor learning, affordances guide action selection.
Action is driven by affordance perspectives relative to environmental constraints.
Simply put, the main goal when training an athlete is to build an environmental challenge that forces outputs at or near the limits of their current capacity. That’s how adaptations take place. pic.twitter.com/9sOKPE7Whg
— Brice Crider (@Crider_HP) January 9, 2025
Attractor Landscapes
In motor learning, an attractor landscape refers to the range of stable movement patterns (attractors) that a system tends to settle into when performing a task. When learning a new motor skill, the learner’s movement patterns (or motor solutions) may be unstable initially. Over time, through practice and adaptation, stable patterns emerge as attractors.The more ingrained a stable pattern has become, the larger its pull on motor patterns. These attractors can be both positive and negative factors towards achieving desired skill outcomes, and the landscape is constantly fluctuating second to second base on the action-perception feedback loop.
Block-Based Learning
Block based learning involves practicing one skill or movement repeatedly in a structured, predictable manner before moving on progressively to another skill. The majority of motor learning strategies in America over the last 40 years have been block based. Research has shown block based strategies to be relatively ineffective for skills past novel ranges.
Differential Learning
Differential learning strategies focus on using variability to enhance skill acquisition by avoiding repetitive, stagnant practice. Instead of trying to refine a single optimal movement pattern, throwers are exposed to a wide range of movement variations. This variability helps the athlete become a more robust, adaptable mover.
Constraint-Based Learning
Constraint-based learning modifies task, environmental, or anthropometric/physiological constraints to guide motor skill development. This will be the focus of the blog,
Classifying Constraints
Constraints can be broken down into 3 categories:
Anthropometric/Physiological Constraints
These are individual characteristics that affect the way an athlete can move, such as limb length, muscle size, tendon stiffness, mobility, or neural output. Although these constraints are less immediately malleable than environmental or task specific constraints, its important to keep in mind that they are always shifting and changing throughout the athletes life cycle.

A look at the differences between my throwing and non throwing shoulder in horizontal abduction.
In order to develop expression of the skill, the athlete first needs the physiological capacity necessary for specific skill expression. Because of this, these constraints set the ground floor for the attractor landscape.
Environmental Constraints
These are external factors, such as weather, terrain, lighting, and social or cultural contexts, that shape the affordance perspectives that guide action selection. One of the interesting insights I’ve had while working in training environments around the world is that motor pattern preferences often seem to be regional. High level Japanese and American pitchers have a clear divide in their movement strategies, likely driven by their learning environment.
Environmental constraints are much more modifiable than most people think they would be. One of my favorite forms of environmental change is playing dance or house music (typically 4/4 or 3/4 tempo, around 128 bpm) that encourages global rhythmic movement in the skill.
Task Specific Constraints
These are constraints that are by definition specific to the task at hand. Implement mass and weight, starting positions, and reward or point systems that define objective success or failure at the task. This blog will primarily focus on task specific constraints.
Between anatomical, environmental, and task specific constraints, there are almost infinite ways a constraint led motor learning approach can be applied. Because of this, it can be extremely to group these possible strategies into clusters, ensuring decision making in the face of infinite options is a practical and systemizable task.
Task Specific Constraint Heuristics for Throwers
There are four specific buckets that task specific constraints can be grouped into. All four of these approaches can be blended to train the desired skill adaptation,
1. Changing the mass of the implement
The classic. Play the hits. Although the use of overload and underload throwing implements has become common place, it’s incredibly important to understand exactly why changing the mass has such a large effect on movement outcomes.
One of the foundational principles of variably loaded ballistic work is that heavier and lighter implements have different effects on motor learning due to the difference in the implements inertia (the tendency of an object to resist a change in its motion).
Overloads and Underloads bias very different force-time shapes, changing the strategy necessary to produce the necessary impulse (area under the force time curve) necessary to change the implements velocity. Overloads will have more total force over a longer period, and a lower peak force. Underload implements will have significantly higher peak forces, and rates of force development, resulting in a much sharper, shorter force curve.
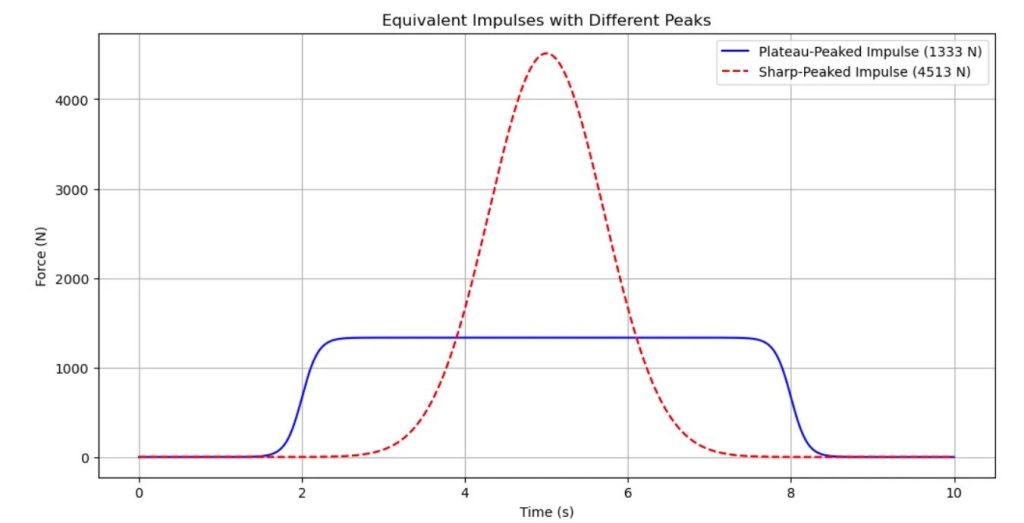
Example of wider and skinnier force-time curves that have the same impulse (area under the force-time curve)
This difference between peak force and total force is the most common misunderstanding about variably loaded throwing. If you throw an implement with too much total force that you’re unprepared for (pulling down a 30 lb kettlebell for instance), you’ll get hurt. If you throw an implement with too much peak force that you’re unprepared for (pulling down a 2 oz baseball 120 mph for instance) you’ll get hurt. The name of the game is building yourself to handle these forces gradually, and making sure there’s transfer into the competition implement.
Heavier implements help you learn to get in better positions, and to organize yourself around the most optimal path of the implement, rather than the other way around. There’s a certain level of relaxation necessary to create the “pull” needed to throw overload implements well, because of how much more difficult it is to change its state of motion.
Lighter implements do the opposite. They magnify the effects of being unable to relax into good positions, giving you very little proprioceptive feedback for pulling around them due to having low inertia. You’ll see much higher variations in outputs between good throws and bad throws with the lighter implements, partially due to this fact.
As a general rule, overload implements teach the athlete to relax into better positions, and underload implements teach the athlete to sequence more efficiently by magnifying the flaws at higher speeds, and higher peak forces.
2. Changing the moment of inertia by changing the size or shape of the implement
This is another classic, but is utilized much less in modern throwers than it should be. Hitters have intrinsically understood this for a very long time, using short, long, skinny, and handle/end loaded bats to change movement patterns. Hammer throwers have also been early to the game on this, not only using variably weighted hammers but variable lengths of wire.
The moment of inertia (MOI) is a measure of an object’s resistance to rotational motion about a specific axis. Changing the size or shape of the implement will change its MOI, requiring different motor learning strategies to move it through space,
Firstly, you can change the size of the implement while keeping its shape relatively the same. This approach is very popular in differential command training, but it can also be used to drive specific motor learning constraints. In respect to throwing a spherical object, making the object much larger will require the athletes to yield (supination, shoulder external rotation, shoulder horizontal abduction) longer because of the positional demands of the larger implement (similar to throwing a football). Smaller sizes will make manipulating the object into propulsion (pronation, shoulder internal rotation, shoulder horizontal adduction) more of a driver due to having more degrees of freedom relative to the smaller implement. In 2020 I remember watching Rob Hill have guys that were having a tough time creating a vertical fastball profile throw the undersize command balls in training. Makes sense.
Another possible change is to modify the shape of the implement, such as going from a more spherical object like a baseball to a more linearly shaped implement such as a turbo javelin. This change in the MOI, alongside the ramifications of throwing a longer object in space, will require different movement strategies as the arm moves through the driveline phase. In order to move the implement in a linear fashion with less degrees of freedom than a spherical object, the thrower will have to learn to manipulate their center of mass around the most optimal line of pull for the implement through the target, a skill that will be very important when they return to the competition implement. All this is doing is using the MOI to manipulate the driveline phase (the transfer of rotational momentum into linear momentum as the arm unwinds from ER into IR) by making the task either more or less linear relative to the competition implement.
When I was working in Japan, I watched a 95 mph arm put on a motor learning master class of blending these MOI based constraints into the competition implement. He started with the 800 gram javelin, then the 600 gram turbo javelin, then a nerf football, then a softball, then a undersized command ball, and finally a baseball. He challenged his ability to be adaptable and know where his limbs were in space relative to varying implements, and slowly dialed that towards the competition implement.
With any of the buckets mentioned when it comes to the constraints led approach, it’s important to remember that variations are always relative to the competition implement. A turbo javelin may be considered a overload implement with significantly less degrees of freedom to a baseball player, but to a javelin thrower it’s an underload with significantly more degrees of freedom. All perception based on current capacity and skill affordances.
3. Changing the kinematics of the throwers center of mass relative to the ground and the target
A brief refresher on kinematics is probably in order. Kinematics is the branch of physics that deals with the motion of objects without considering the forces that cause the motion. The main metrics of kinematic observation are acceleration, velocity, and displacement
So in short, we can change the starting displacement and velocity of our center of mass (COM) relative to the ground, the target, or both. A great example of changing COM relative to the ground would be throwing on a mound versus flat ground, changing the amount of potential gravitational energy the athlete has. An opposite example would be starting the athletes center of mass closer to ground by kneeling, starting them in more hip flexion as the throw begins.
Changing the position of the target relative to the COM in the X,Y, and Z planes will also apply a constraint to the movement patterns necessary to complete the task. For example, trying to throw as high as possible will require different positions and timings then a relatively flatter throw if the athlete is to both hit the target and manage their own COM relative to the ground.
This manipulation of COM kinematics isn’t just changing the starting position in space, but also the linear and angular velocities that the throw begins in. A pulldown, drop step, roll in, and step back all preset the athletes COM in very different starting velocities relative to the ground and target when the throw begins. Manipulating these as well will put a large constraint on the athletes management of their COM in the throw, and allow you to bias more linearly or rotationally than the specific performance of skill in competition.
4. Changing the kinematics of the distal limbs relative to the throwers center of mass
Obviously, this goes hand in hand with changing the COM relative to the ground and target, but it falls into it’s own bucket because it can be changed independent of those variables. Changing the preset kinematics of the distal limbs (significantly, but not limited to, the throwing arm) will have a large effect on the attractor landscape of movement patterns as the throw takes place.
A very simple example is the common modifications for a pivot pick. 90 degree constrained, figure eights, glove taps, jav style preset throws, etcetera are all ways to change the kinematics of the arm relative to the throwers COM as the throw begins, and sunsequently their degrees of freedom in that throw.
Here’s an example of how changing the starting kinematics of multiple distal limbs relative to the athletes center of mass can constrain the throwing motion towards more desired motor patterns.
In all of these constraint based approaches, the main principles that we’re seeking to influence are the shape of the force curve over time to maximize the impulse put into the implement. Manipulating time is the most valuable tool you have.
Conclusion
There’s quite a bit to take away here, but the importance of building understandable heuristics for motor learning on which to guide your decision making with can’t be emphasized enough. The next step will be doing the work to motion capture larger varieties of each of these constraint buckets and correlate them to specific skill, allowing for more built in variation to drill sets while still being backed by objective data.
This is the most exciting time in history to be building skillful, high output throwers. Happy Hunting,
Comment section